De werkelijkheid is helaas weer wat ingewikkelder.
Geluid verzenden en ontvangen
Hoe wek je geluid op dat vanaf het wateroppervlak helemaal naar de bodem van de zee of oceaan gaat en weer terug?
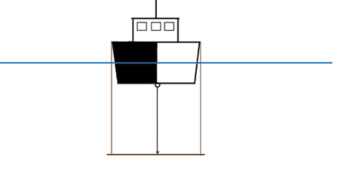
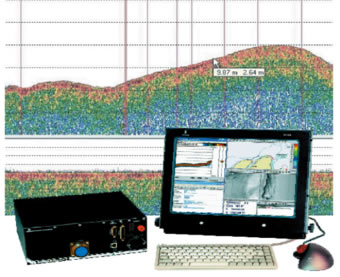
Daar is apparatuur voor nodig.: een echolood. Dat apparaat bestaat uit een zender en een ontvanger, een bedienings- en registratiekast en kabels. De zender en ontvanger die elektrische signalen omvormen tot akoestische (geluid) en andersom, worden samen een transducer genoemd. Zo'n transducer is vaak bevestigd aan een meetschip en bevindt zich onder water (zie afbeelding). |